
PPO: Proximal Policy Optimization Algorithms 近端策略优化算法

- Published on
- /6 mins read/––– views
- paper: 1707.06347
- Proximal Policy Optimization Algorithms 近端策略优化算法
“近端 proximal” 主要体现在对策略更新幅度的限制,保证新策略和旧策略之间较为 “接近”,这是算法的核心特性。
简介
近端策略优化(PPO)算法旨在结合信任区域策略优化(TRPO)的数据效率和可靠性能,同时使用更简单的一阶优化方法。
其核心在于提出了一个带有裁剪概率比(clipped probability ratios)的目标函数,以此对策略性能进行悲观估计(pessimistic estimate i.e. lower bound)。
传统策略优化
论文中提到了以下两种传统策略优化作为 background:
- 在标准策略梯度方法中,目标是最大化策略梯度估计器对应的目标函数
- 是随机策略,是优势函数在时刻的估计值。
- 在信任区域策略优化(TRPO)中,TRPO 会最大化一个替代目标函数 ,
- 表示概率比率
- 是优势函数估计值
然而,如果没有约束条件,对进行最大化会导致策略更新幅度过大,影响学习的稳定性。
原理
Clipped Surrogate Objective
Clipped Surrogate Objective(裁剪替代目标函数)是 PPO 算法中的关键概念,旨在改进传统策略优化中可能出现的策略更新幅度过大的问题,使策略学习更加稳定和有效。
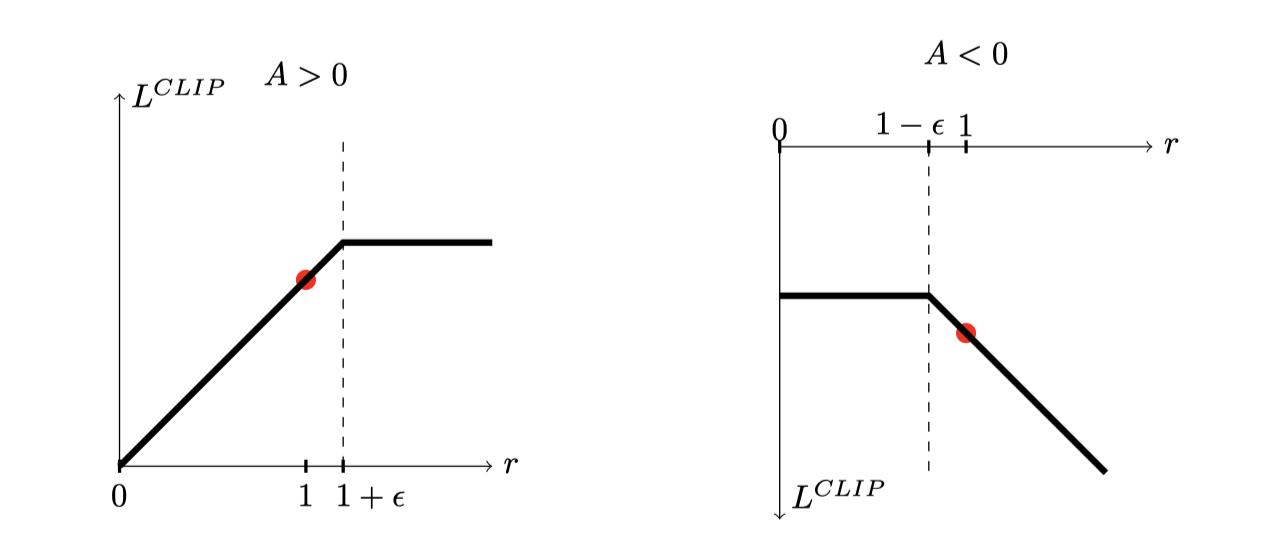
PPO提出的裁剪替代目标函数为
- 是超参数,常取
重点在于裁剪函数 ,它将概率比率 限制在 区间内 - 如果 超出区间端点,则裁剪为duan端点;在区间内则保持不变
的 min 函数中:
- 参数一是 TRPO 中的目标函数
- 参数二是代入裁剪过的概率比率的目标函数
取两者最小值,使得 成为未裁剪目标函数 的下限,即文中提到的 pessimistic 的界限。
Adaptive KL Penalty Coefficient
除了裁剪概率比率,PPO 还提出了另一种方法,自适应 KL 散度惩罚系数,其目标函数为:
- 是一个系数,需要动态调整
- 是新旧策略在状态下的KL散度
通过在目标函数中加入KL散度惩罚项,限制策略更新的幅度。
实现
PPO算法的具体实现步骤如下:
- 数据采样:使用当前策略与环境进行交互,收集一批轨迹数据,其中是状态,是动作,是奖励。
- 优势估计:计算每个时间步的优势函数估计值。常见的方法有广义优势估计(Generalized Advantage Estimation,GAE)等。
- 目标函数优化:根据选定的目标函数(如或),使用随机梯度上升算法对策略参数进行多轮次(多个epoch)的小batch更新。例如,对于PPO中的CLIP方法,通过最大化来更新。
- 参数更新:在完成对采样数据的多轮优化后,更新策略参数,并重复上述步骤进行下一轮的采样和优化。
优势
PPO算法具有以下显著优势:
- 实现简单:相较于TRPO,PPO无需复杂的二阶优化方法(如共轭梯度算法),仅使用一阶优化(如随机梯度上升),降低了实现难度和计算复杂度。
- 数据效率高:通过 clipped 或 KL散度惩罚项 的方法,PPO能够在有限的样本数据上进行有效的策略更新,避免了策略更新幅度过大导致的性能波动,提高了数据的利用效率。
- 通用性强:PPO适用于各种不同的强化学习任务,包括连续控制任务和离散动作空间任务(如Atari游戏)。在实验中,它在多个基准任务上表现出色,能够在不同的环境中取得较好的性能。
- 样本复杂度低:与其他在线策略梯度方法相比,PPO在较少的样本数量下就能达到较好的性能,减少了与环境交互的次数,从而节省了训练时间和资源。
← Previous post国内访问 Vercel 部署应用
Next post →Overleaf的引用及参考文献