

cssclasses:
- smalli number headings:
- ML 2022 Spring
- ML 2025 Spring
- GitHub - datawhalechina/leedl-tutorial
- 本文是基于datawhale苹果书和李宏毅教授2021-2025ML课程的笔记
ML Framework
target: looking for function
- function with unknown
- define loss
- optimization
function with unknown
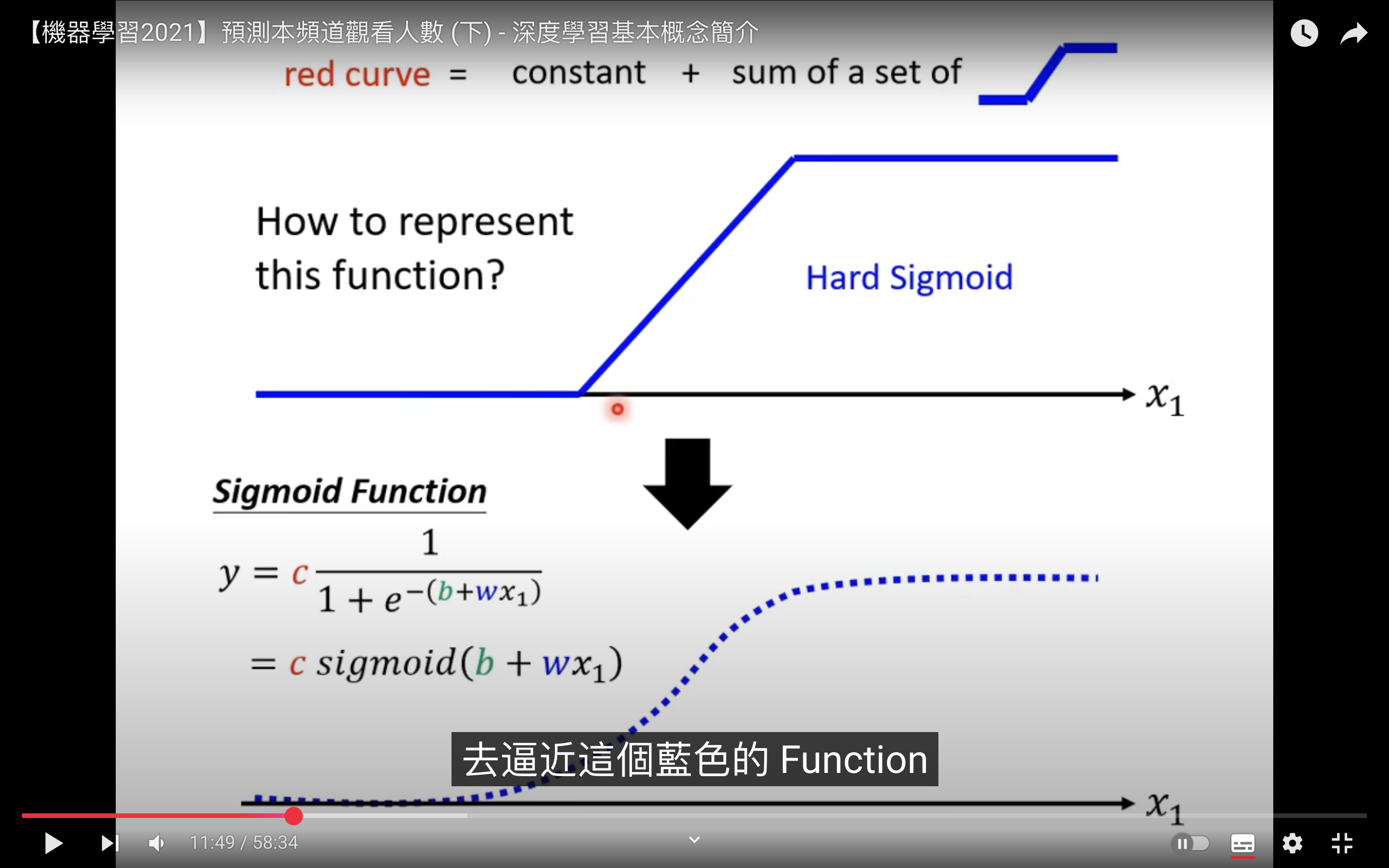
Hard Sigmoid 是常见的目标 function。
- 可以用 Sigmoid Function 逼近 Hard Sigmoid
多个 sigmoid 合成 red curve
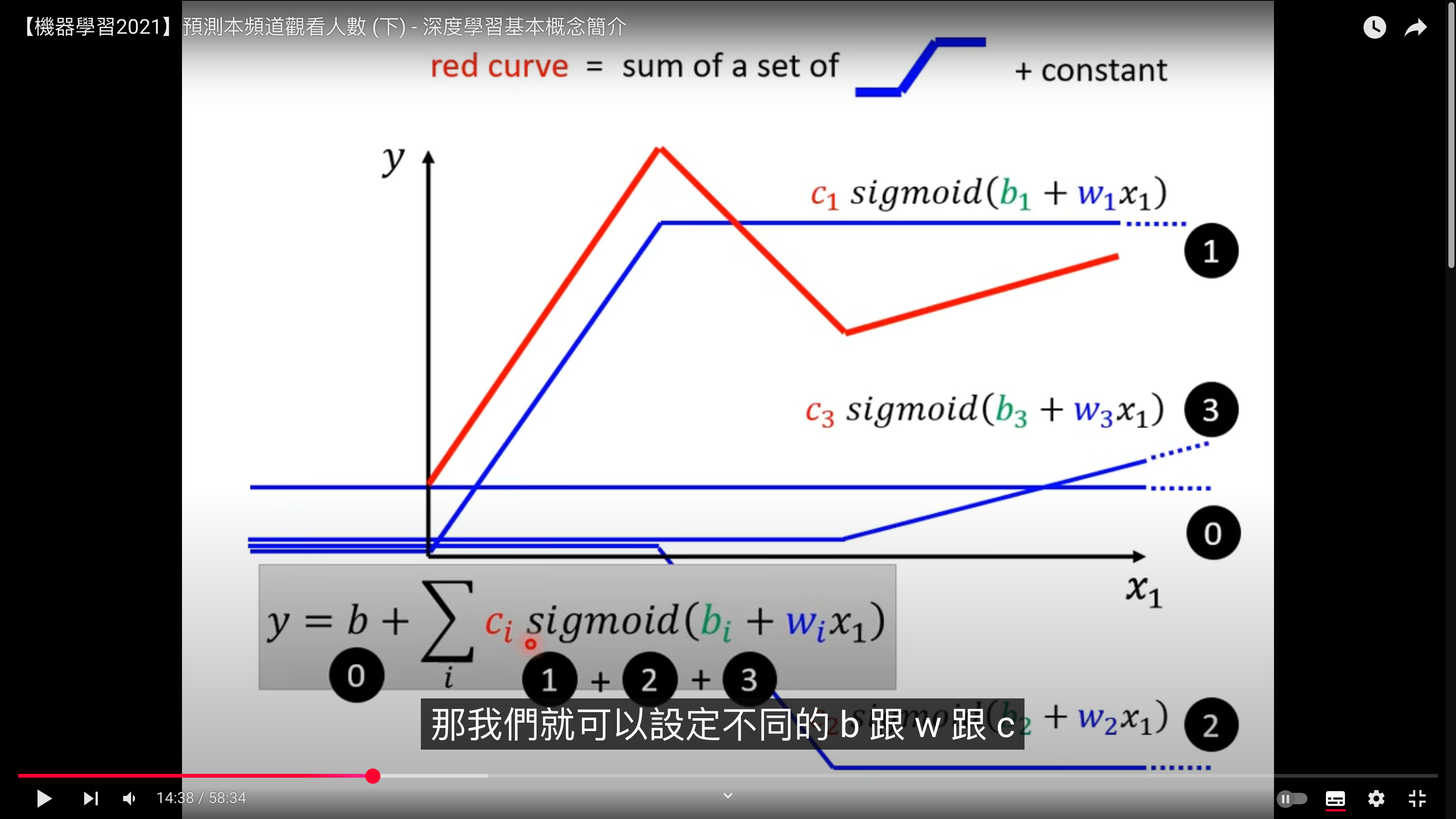
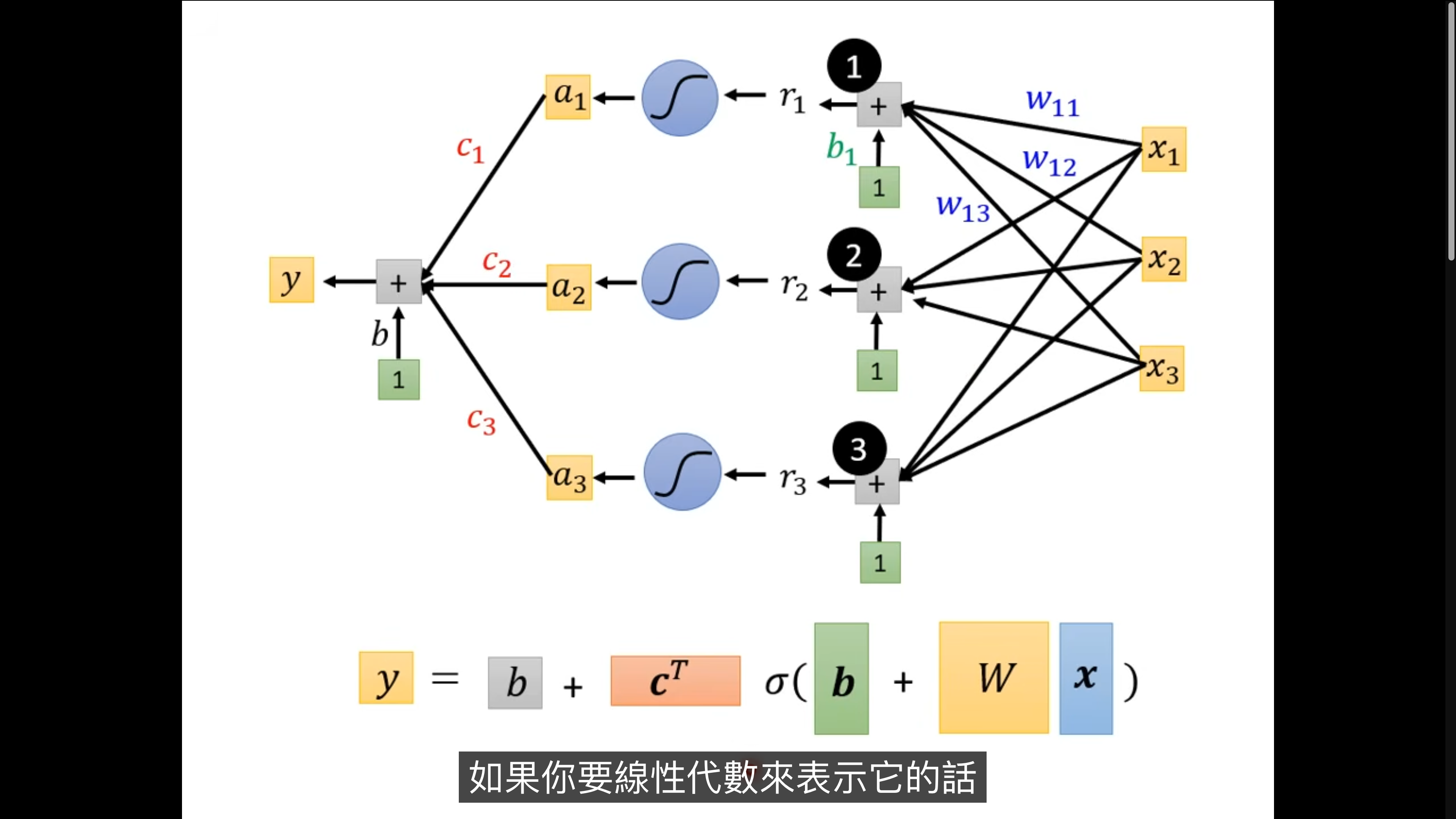
最终的 function with unknown
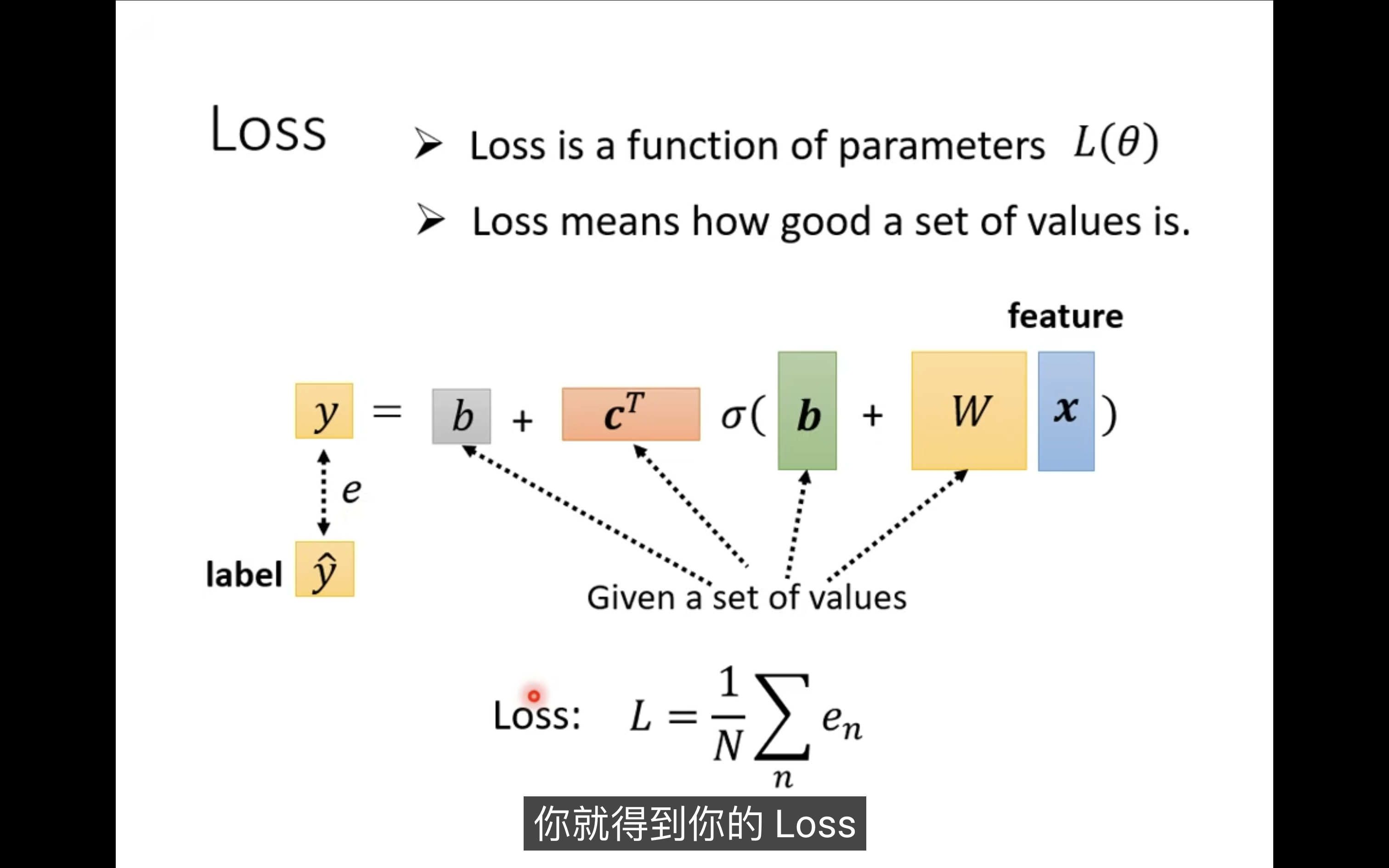
loss
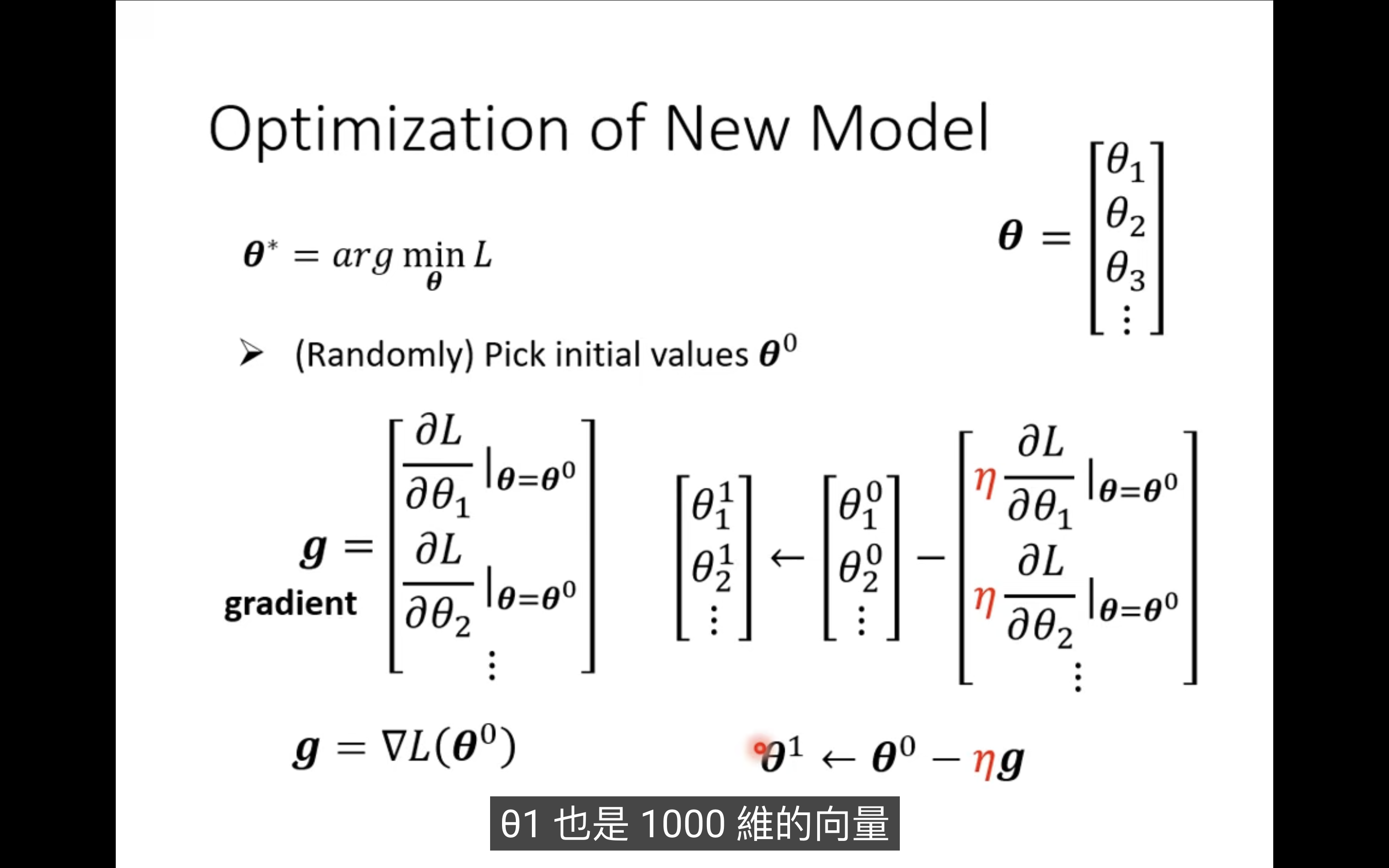
optimize
不断更新 gradient
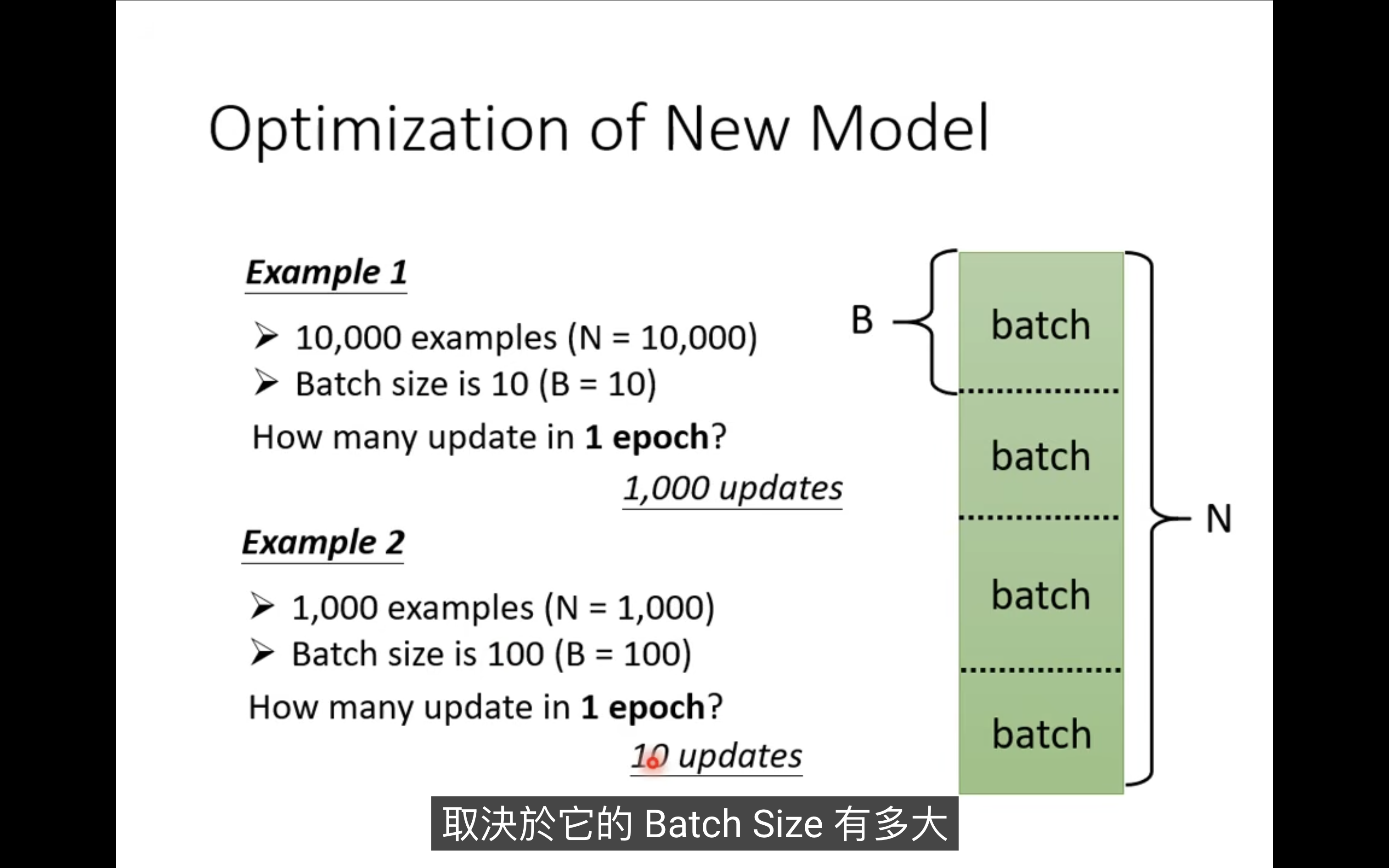
总的数据集会分成很多 batch:
- 遍历所有batch称为一次epoch
- update指更新一次batch
more layers
可以把模型进一步改成多层:
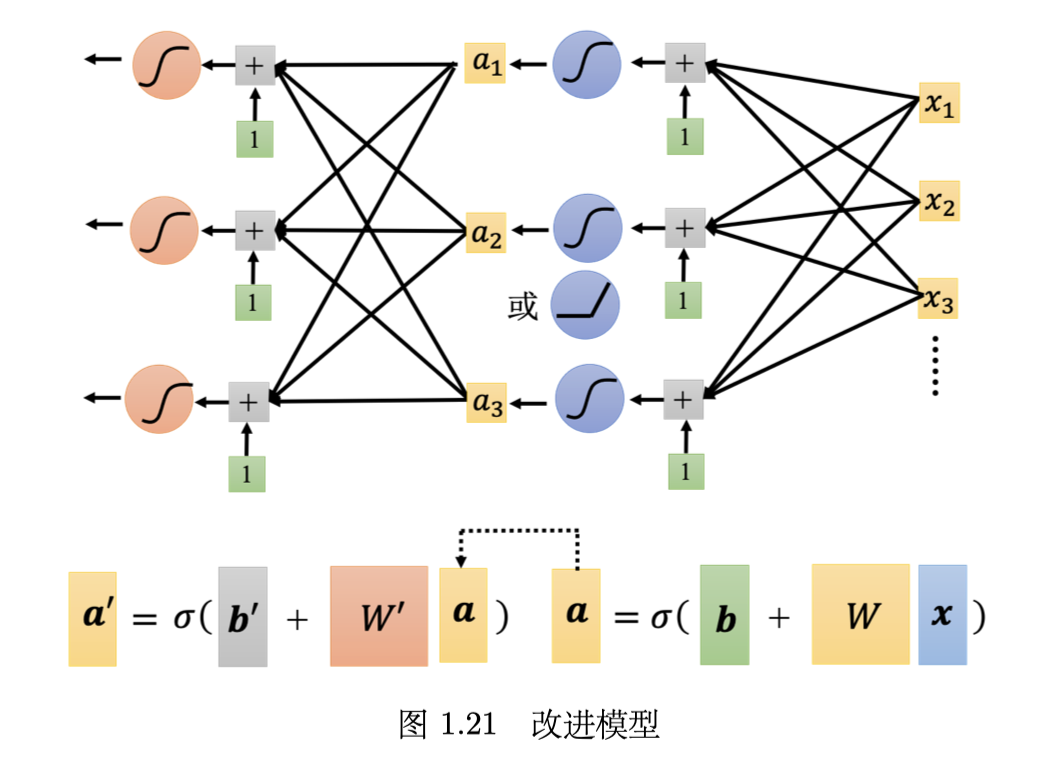
每一层都是一个 Sigmoid 或 ReLU 的 function,称为神经元(neuron),很多的神经元称为神经网络 (neural network)。
神经网络不是新的技术,80、90 年代就已经用过了,后来为了要重振神经网络的雄风,所以需要新的名字。每一层,称为隐藏层(hidden layer),很多的隐藏层就“深”,这套技术称为深度学习。
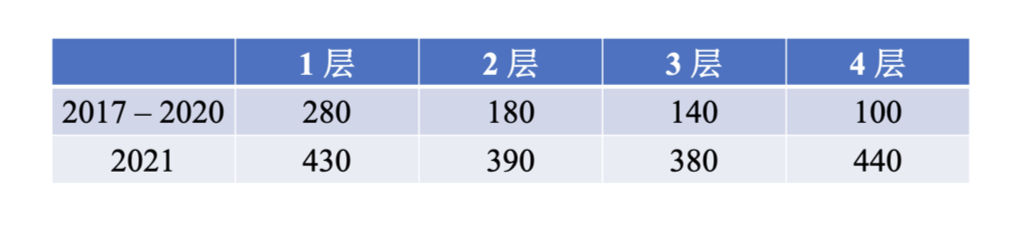
但是层数不一定越深越好,可能会出现过拟合 overfitting 的问题:
General Guidance
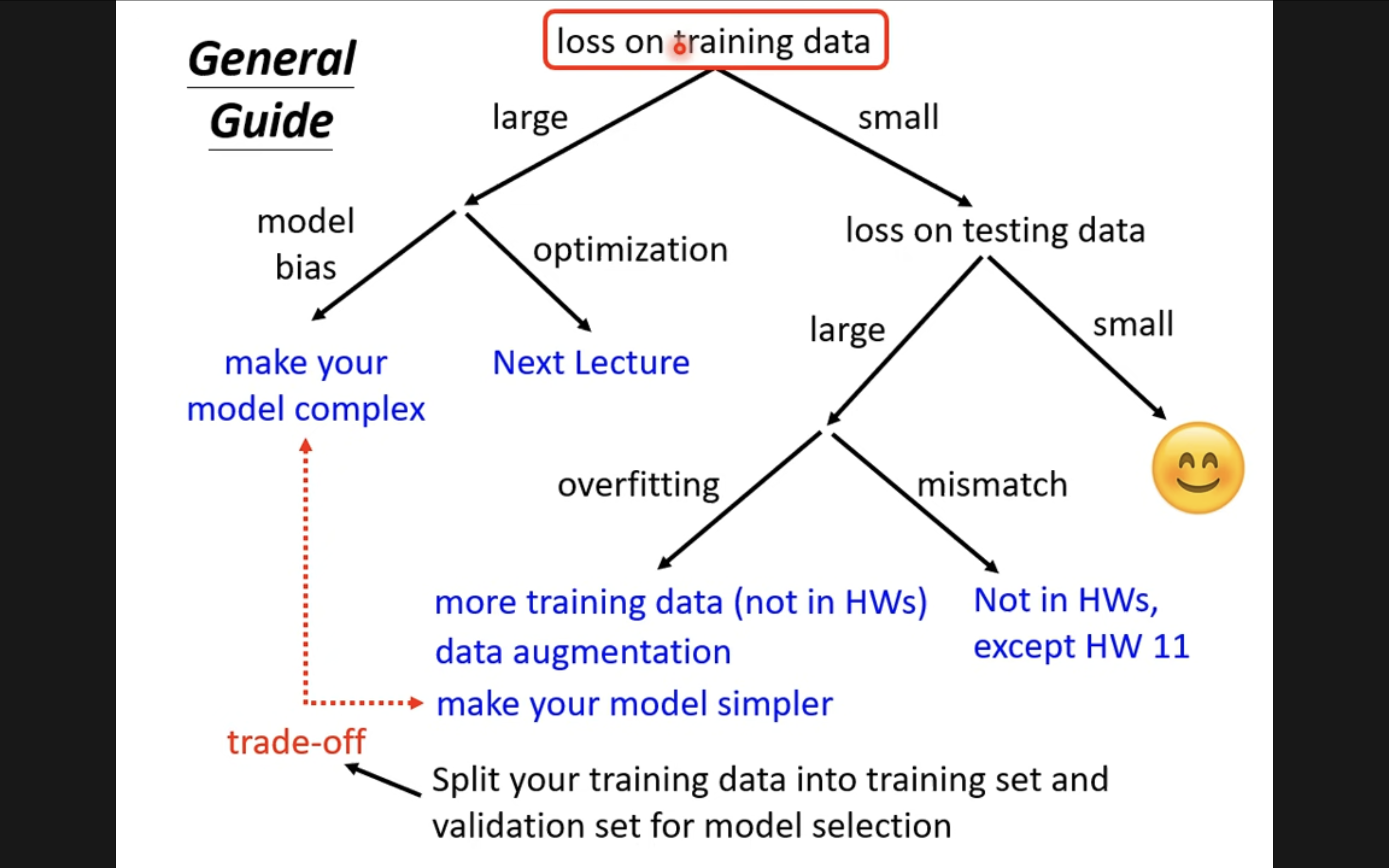
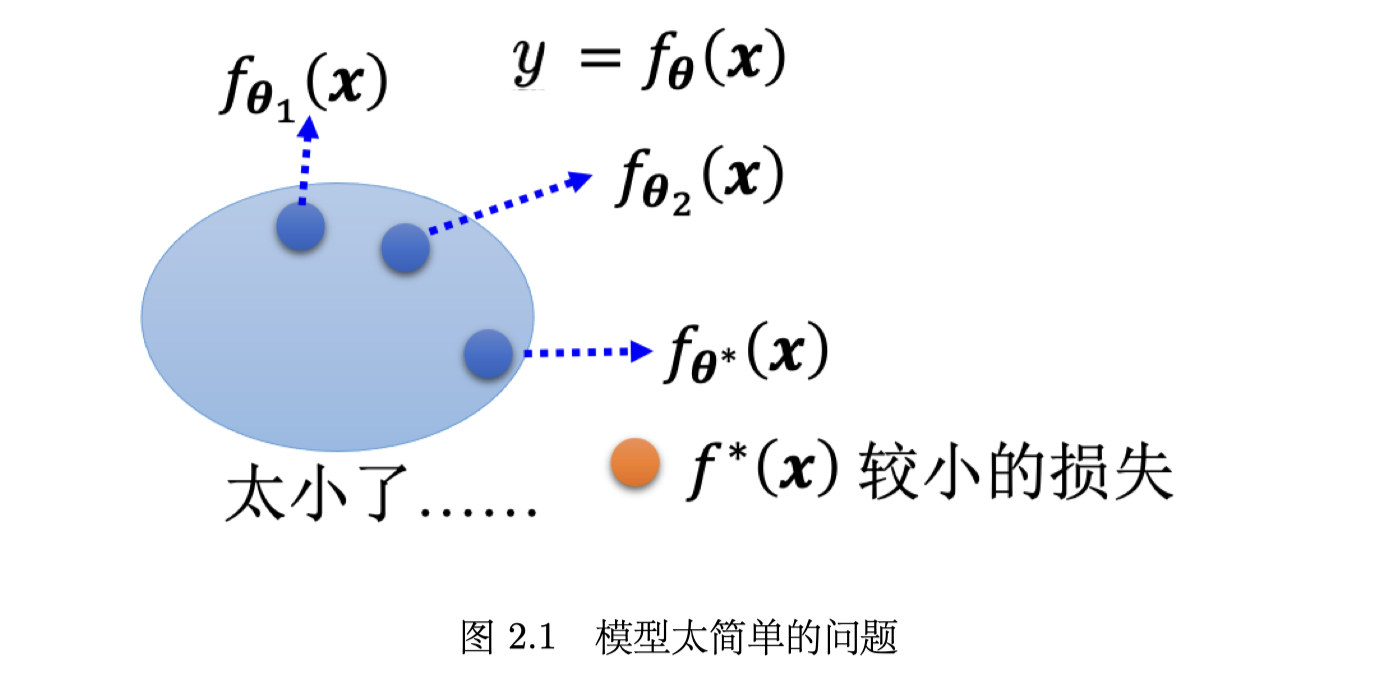
model bias
假设模型过于简单,一个有未知参数的函数代 θ1 得到一个函数 fθ1(x),同理可得到另一个函数 fθ2(x),把所有的函数集合起来得到一个函数的集合。但是该函数的集合太小了,没有包含任何一个函数,可以让损失变低的函数不在模 型可以描述的范围内。在这种情况下,就算找出了一个 θ∗ ,虽然它是这些蓝色的函数里面最好的一个,但损失还是不够低。
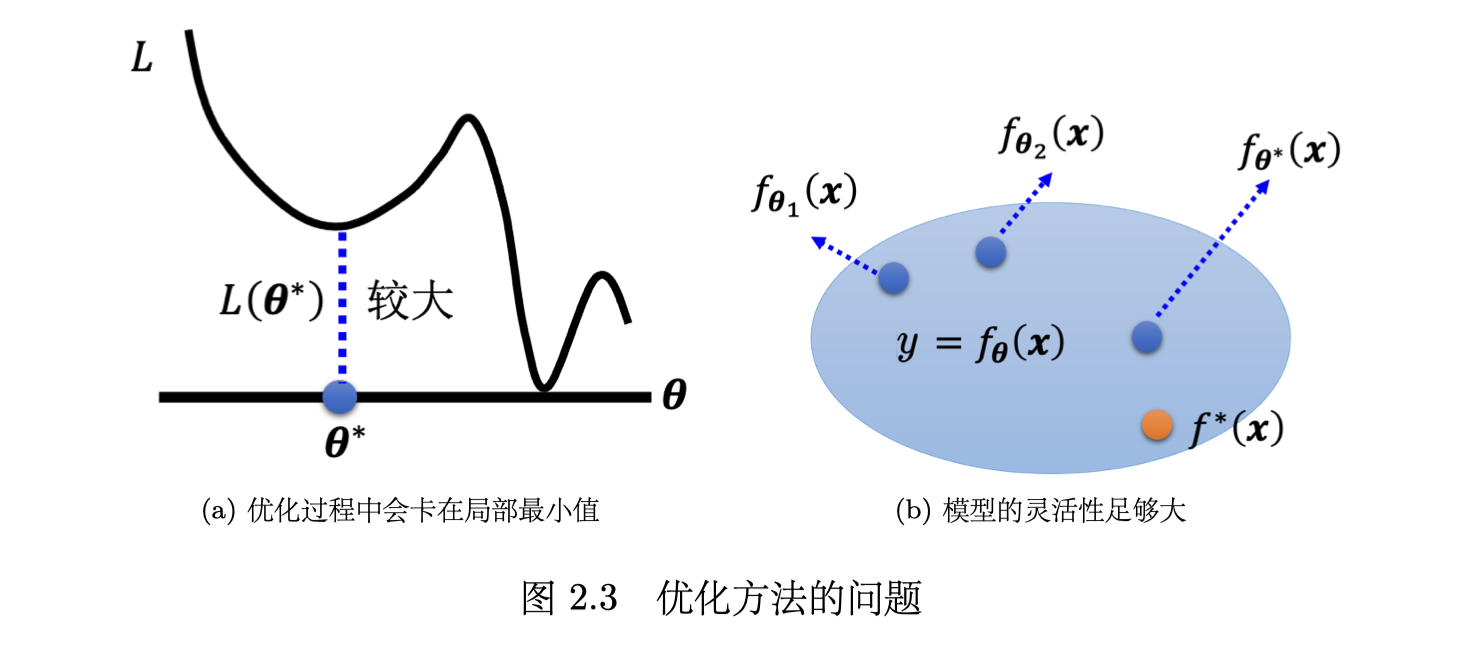
optimization
一般只会用到梯度下降进行优化,这种优化的方法很多的问题。比如(a)可能会卡在局部最小值的地方,无法找到一个真的可以让损失很低的参数。
overfitting
过拟合的表现为:训练数据上面的损失小,测试数据上的损失大。
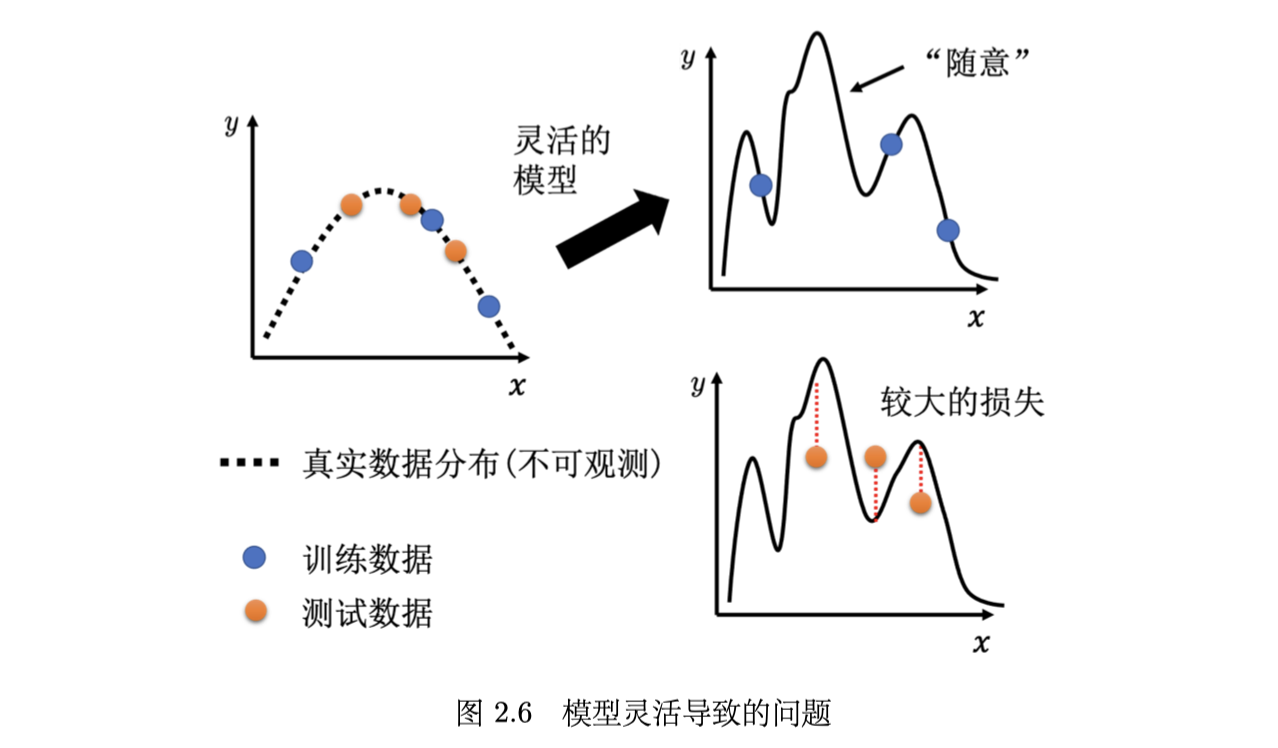
例子:模型过于灵活
在这 3 个蓝点(训练数据)上面,要让损失低,所以模型的这个曲线会通过这 3 个点,但是其它没有训练集做为限制的地方,因为它的灵活性很大,所以模型可以变成各式各样的函数,没有给它数据做为训练,可以产生各式各样奇怪的结果(“随意”)。
最终,表现为训练数据loss为0,测试数据loss很大。
可以用数据增强和限制模型的方法,降低 overfitting
data augmentation
根据问题的理解创造出新的数据。举个例子,在做图像识别的时候,常做的 一个招式是,假设训练集里面有某一张图片,把它左右翻转,或者是把它其中一块截出来放大 等等。
limitation
限制模型,让模型不要有过大的灵活性。
- 减少模型参数:对于神经网络,可以减少每层的参数
- 减少数据特征值
- 早停(early stopping)、正则化(regularization)和丢弃法(dropout method)
cross validation
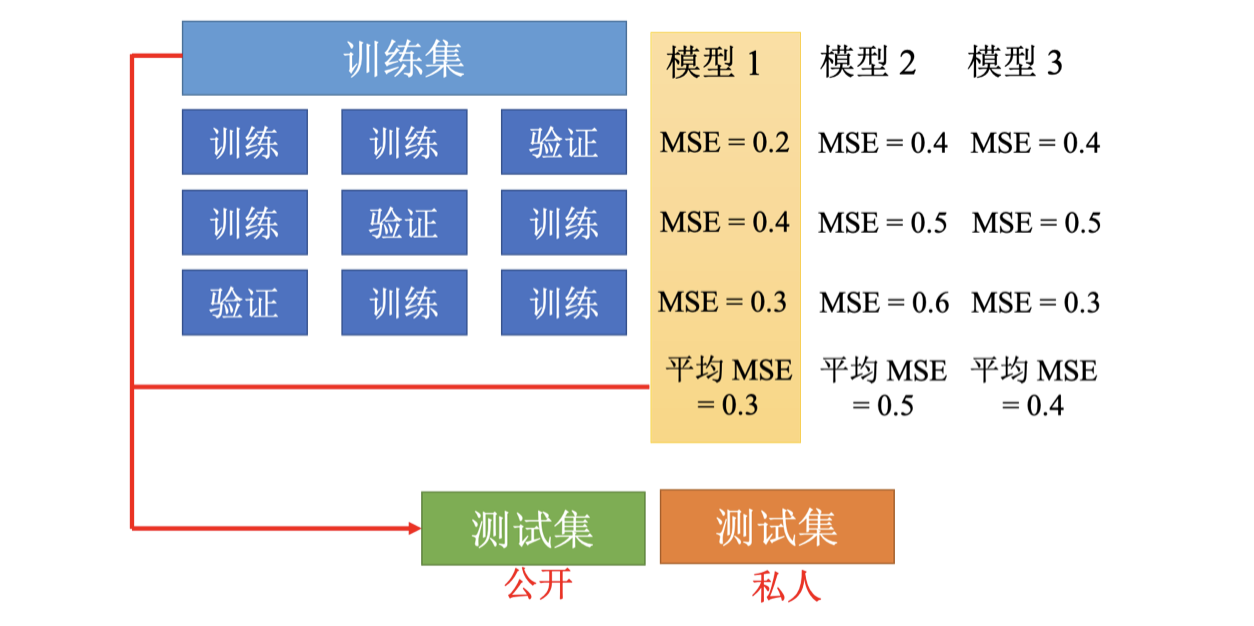
交叉验证 Cross Validation 是为了避免在测试集上面过拟合。
k 折交叉验证就是先把训练集切成 k 等份。在这个例子,训练集被切成 3 等份,切完以后,拿其中一份当作验证集,另外两份当训练集。
- 这件事情要重复 3 次:第一份第 2 份当训练,第 3 份当验证;第一份第 3 份当训练,第 2 份当验证;第 1 份当验证,第 2 份第 3 份当训练。
mismatch
不匹配,简单理解就是一种反常的情况发生了。
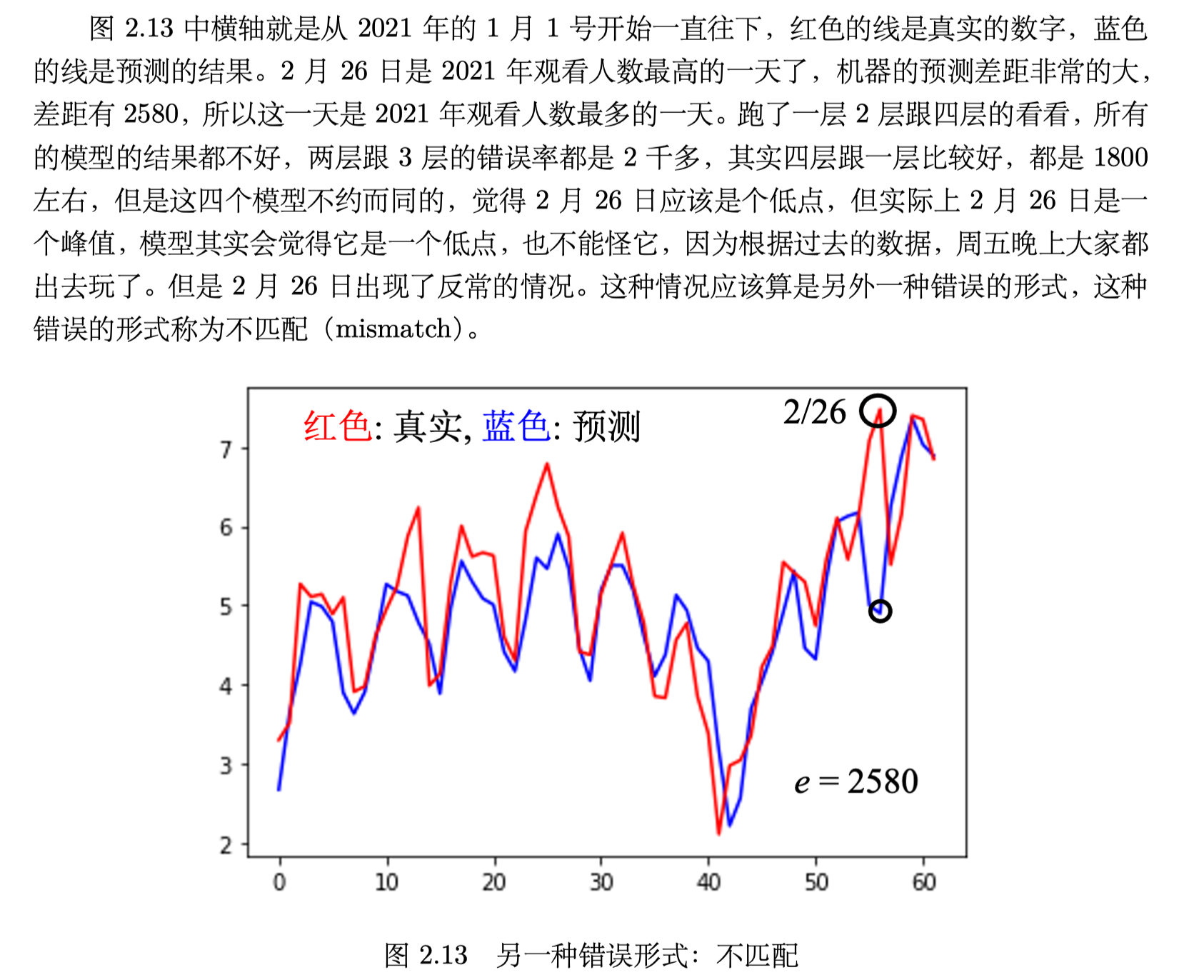
而且,增加数据也不能让模型做得更好,到底有没有mismatch,要看人对数据本身的理解。
Deep Learning Basics
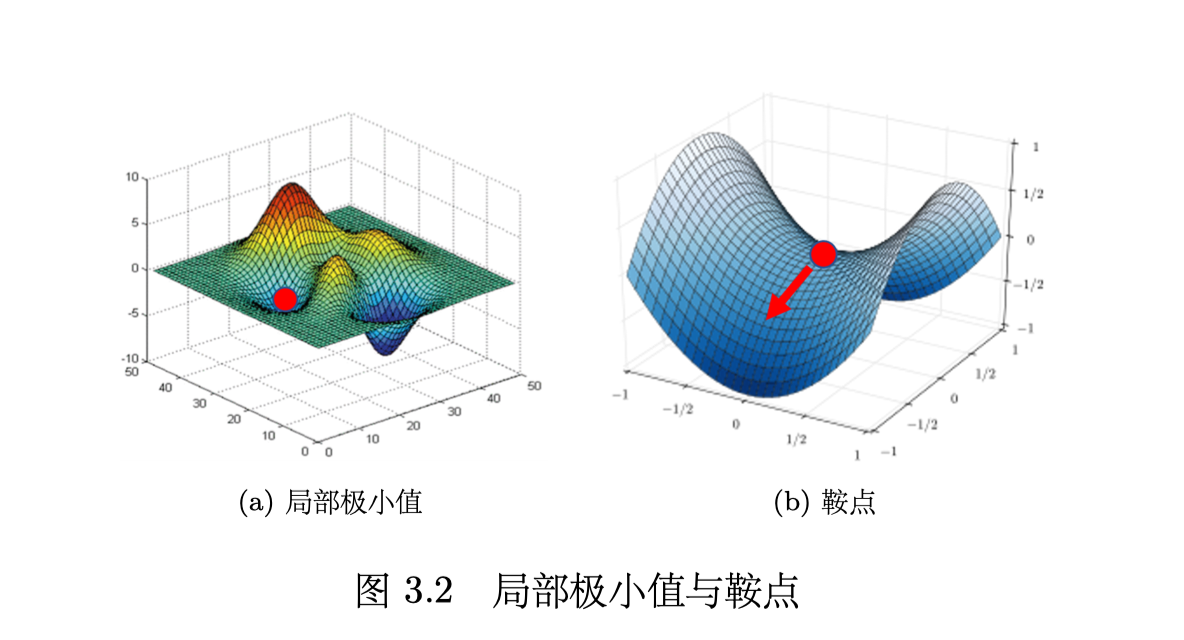
local minima and saddle point
- local minima 是局部极小值
- saddle point 是鞍点,不是极小,可以向其他方向 escape
这两者一般统称为 critical point 临界点。
determining the types of critical point
损失函数可由于泰勒级数近似为:
其中,H 里面放的是 L 的二次微分,可以通过 的正负判断是否是极小值。
batch size
大的批量往往在训练的时候结果比较差,小的批量优化的结果是比较好的,这个是优化的问题。
local minima 也分好坏,如下图:
- flat minima 是好的
- sharp minima 是坏的
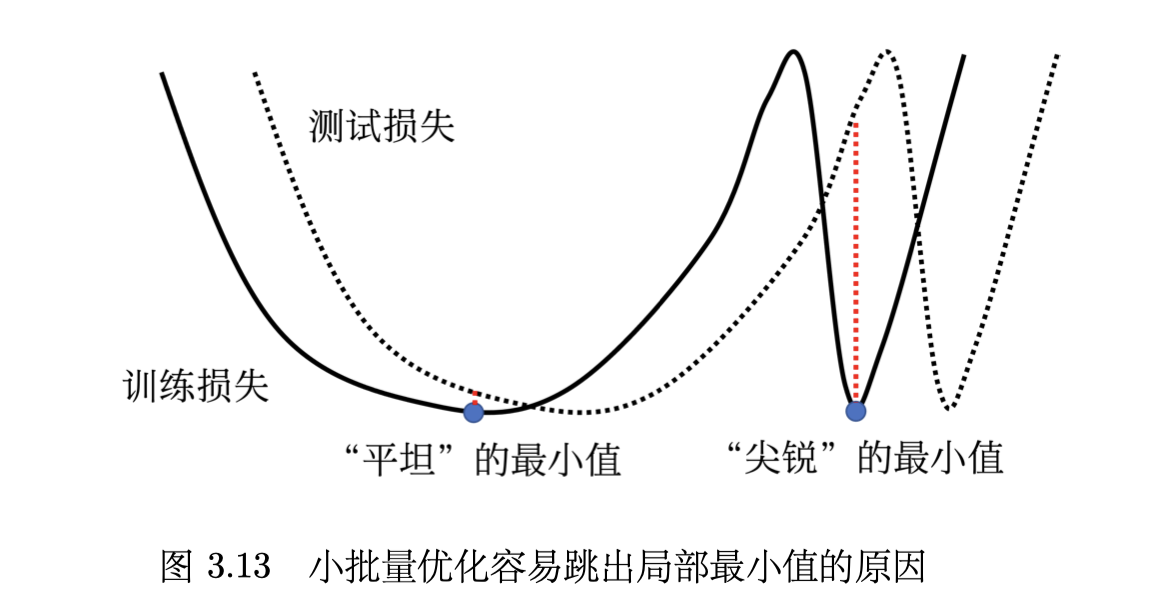
评价 local minima 好坏的根本在于:
- train 和 test 的 loss 一般有一些差别
- 两者的 flat minima 往往很接近
- 但是 sharp minima 很有可能会有很大差别
批量大小对梯度下降法的影响的直观理解:
大的批量大小会让我们倾向于走到“峡谷”里面,而小的批量大小倾向于让我们走到“盆地” 里面。小的批量有很多的损失,其更新方向比较随机,其每次更新的方向都不太一样。即使 “峡谷”非常窄,它也可以跳出去,之后如果有一个非常宽的“盆地”,它才会停下来。
momentum method
- 动量法是另一种可以对抗 local minima 和 saddle point 的方法
假设误差表面就是真正的斜坡,参数是一个球,把球从斜坡上滚下来,如果使用梯度下降,球走到或鞍点就停住了。
但是在物理的世界里,一个球如果从高处滚下来,就算滚到鞍点或局部最小值点,因为惯性的关系它还是会继续往前走。如果球的动量足够大,其甚至翻过小坡继续往前走,它并不一定会被鞍点或局部最小值点卡住,如果将其应用到梯度下降中,这就是动量。
引入动量后,可以从两个角度来理解动量法:
- 一个角度是动量是梯度的反方向加上前一次移动的方向
- 另外一个角度是当加上动量的时候,更新的方向不是只考虑现在的梯度,而是考虑过去所有梯度的总和
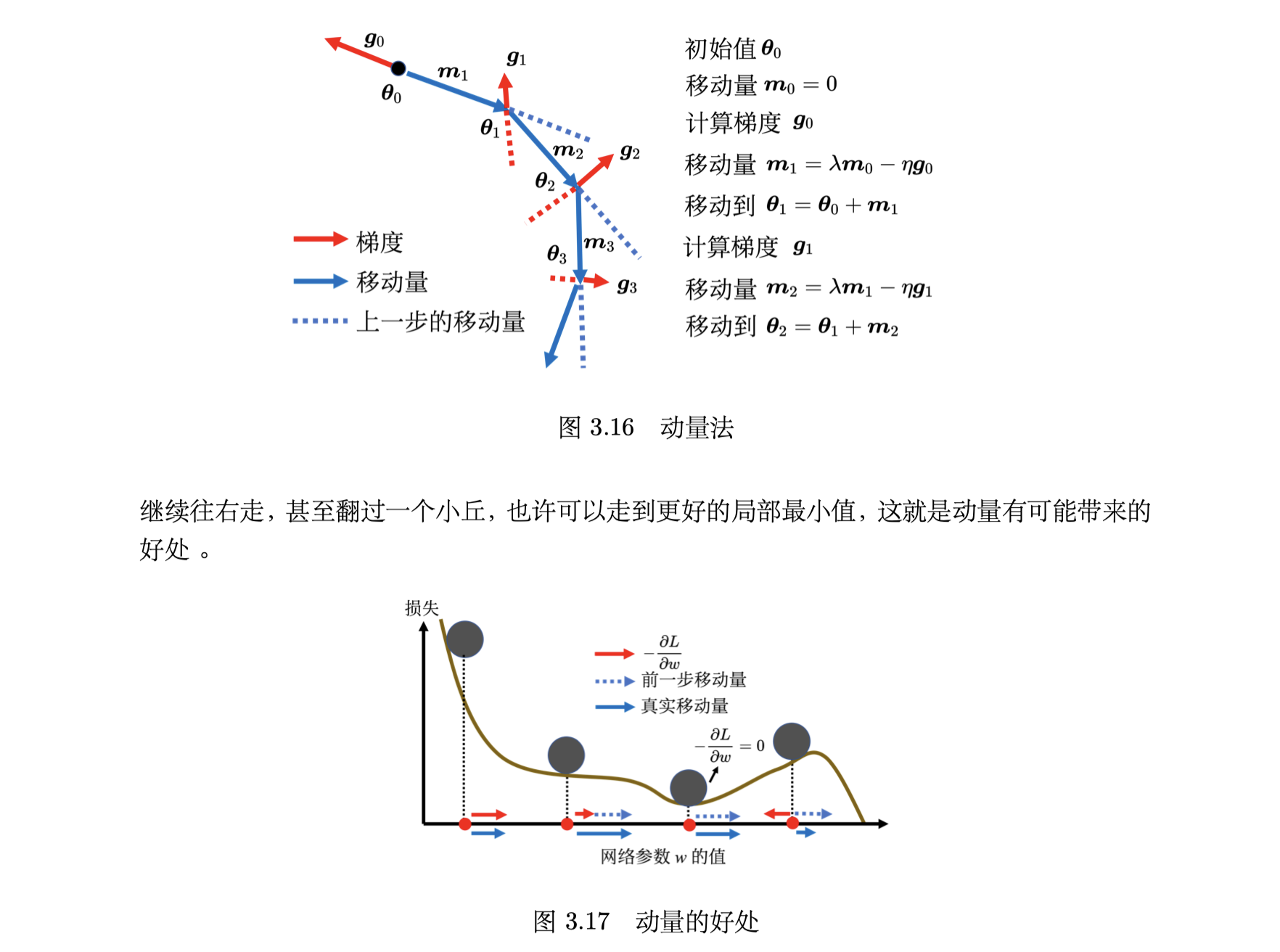
- 其中 η 是学习率, λ 是前一个方向的权重参数,是需要调的。
adaptive learning rate
不同学习率:
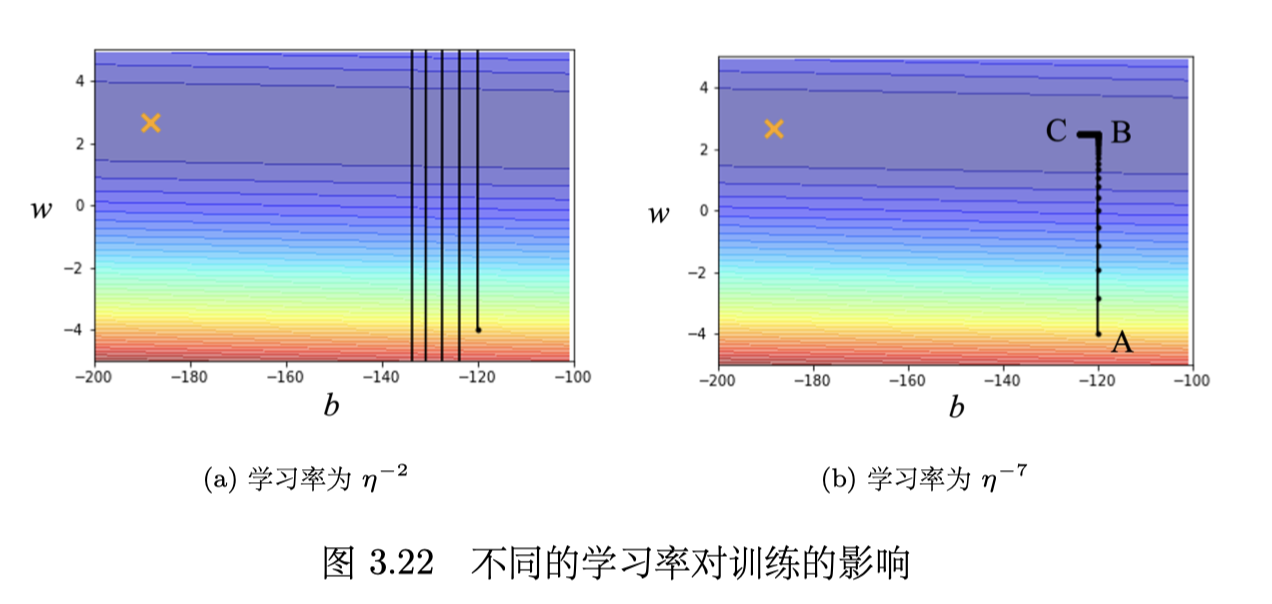
- 图中误差表面的最低点在叉号处
- 学习率太大会导致训练时参数不断震荡,如图a
- 学习率变小可以解决震荡的问题,但是在左拐以后,BC 段的坡度已经非常平坦了(指梯度很小),这种小的学习率无法再让参数前进到目标位置,如图b
AdaGrad
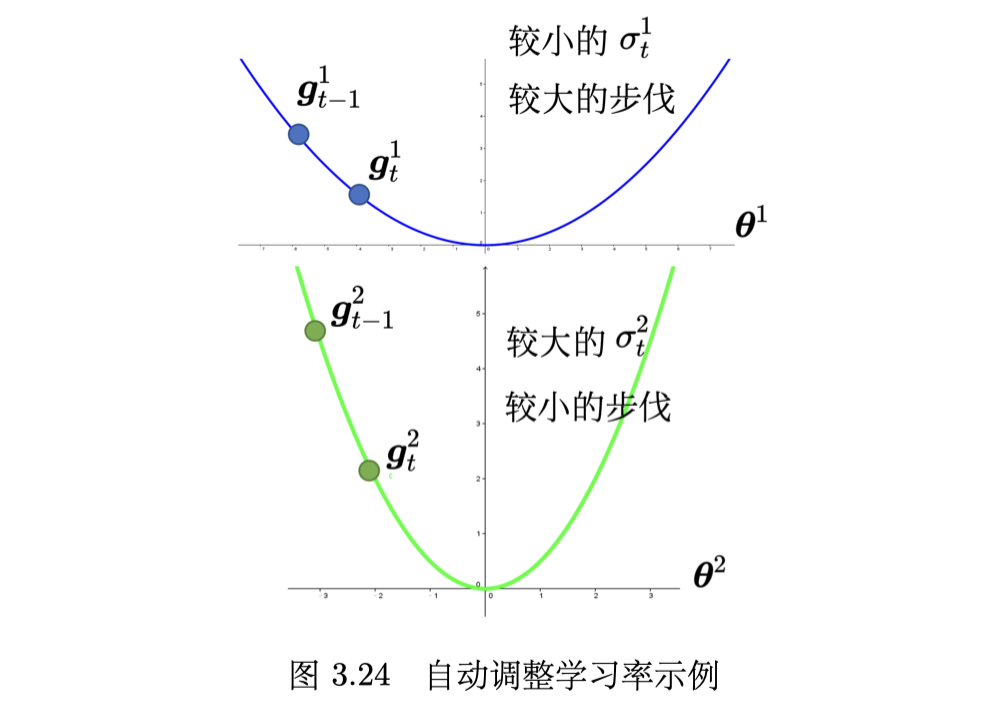
AdaGrad(Adaptive Gradient)是典型的自适应学习率方法,其能够根据梯度大小自 动调整学习率。AdaGrad 可以做到梯度比较大的时候,学习率就减小,梯度比较小的时候,学习率就放大。
原始的梯度下降更新某个参数 θ 的过程为(学习率固定):
AdaGrad 的更新过程,学习率不再固定:
新引入的符号的说明,要点就是学习率就变得参数相关(parameter dependent): 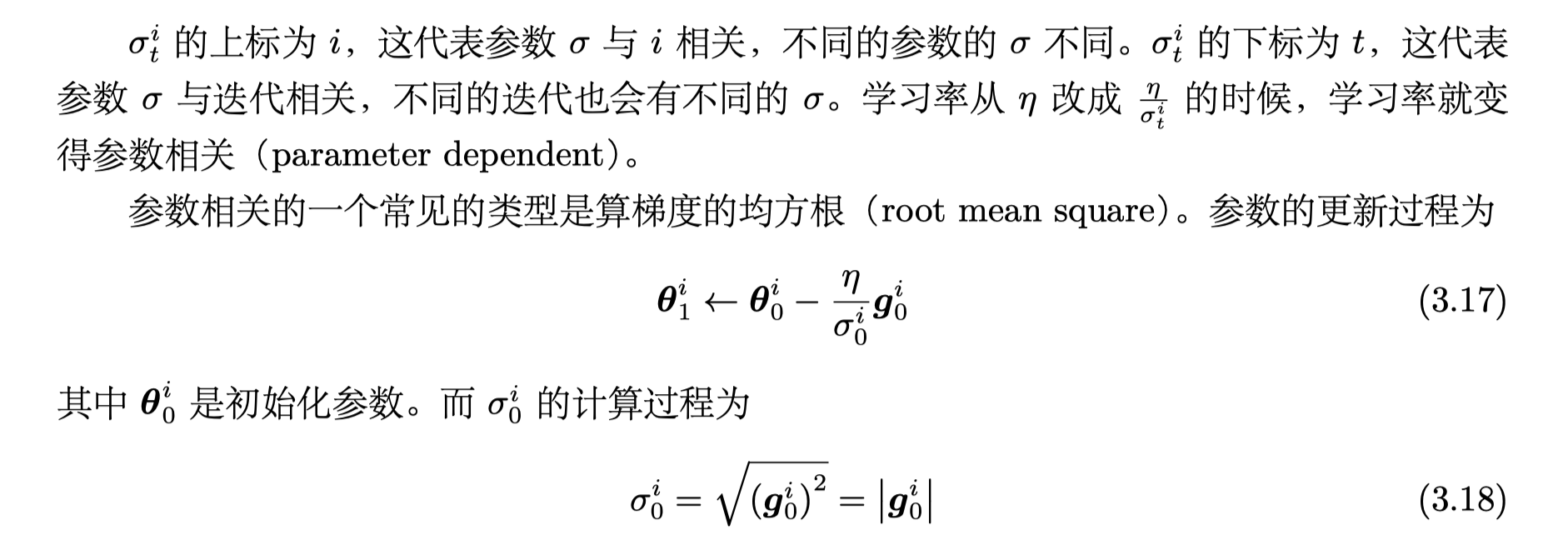
最终自适应的效果如下:
RMSProp
RMSprop(Root Mean Squared propagation)是 Geoffrey Hinton 在 Coursera 上的深度学习的课程中提到的,没有论文,属于黑科技了...
RMSProp 第一步跟 Adagrad 的方法是相同的,即
第二步更新过程为
- 这里额外引入了一个超参数 α,且 0 < α < 1。
通过 α 可以在计算算均方根的时候,调整现在这个梯度的重要性。如果 α 设很大趋近于 1,代表 g1i 比较不重要,之前算出来的梯度比较重要。
而上一节的 Adagrad 则是每一个梯度都有同等的重要性,不够灵活。
Adam
- Adam(Adaptive moment estimation)是最常用的优化策略/优化器 optimizer
Adam 可以看作 RMSprop 加上动量,其使用动量作为参数更新方向,并且能够自适应调整学习率。PyTorch 里面已经写好了 Adam 优化器,这个优化器里面有一些超参数需 要人为决定,但是往往用 PyTorch 预设的参数就足够好了。
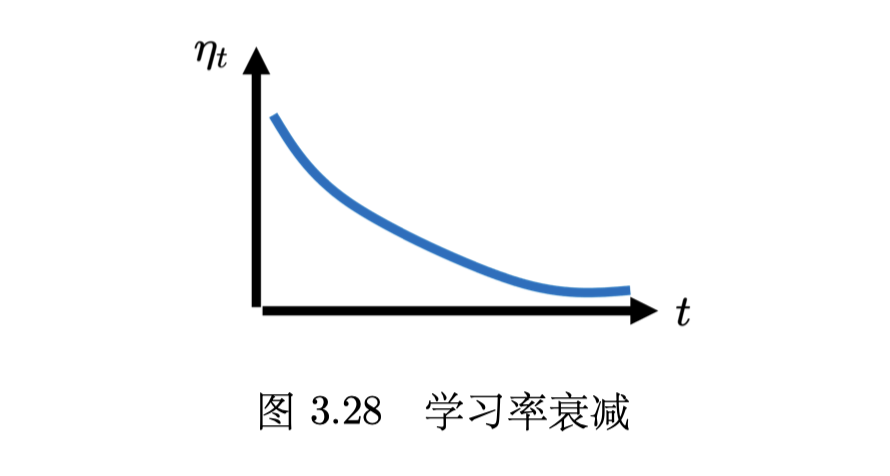
learning rate scheduling
学习率调度(learning rate scheduling)中 η 跟时间有关,最常见的策略是学习率衰减(learning rate decay)。
还有一种策略是 warmup,即先上升一小段,到达一定值再下降。
BERT 和 Transformer 的训练都使用了 warmup,但 warmup 比较像一个 trick,没有人严谨解释为什么,一个可能的原因是:统计的结果需要足够多的数据才精准,一开始统计结果 σ 是不精准的,所以需要先上升一段时间,以收集有关 σ 的统计数据。
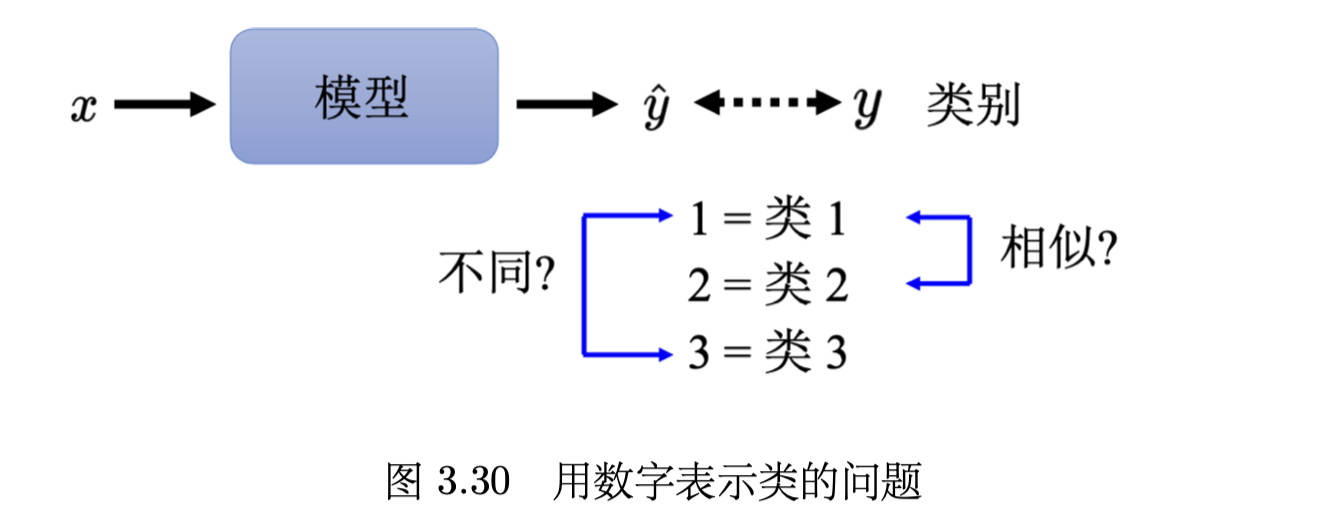
classfication
Class as one-hot vector
使用 one-hot vector 每个vector的距离是一样的,直接用数字 1 2 3 的话,三者之间的距离不同。
On this page
- ML Framework
- function with unknown
- loss
- optimize
- more layers
- General Guidance
- model bias
- optimization
- overfitting
- data augmentation
- limitation
- cross validation
- mismatch
- Deep Learning Basics
- local minima and saddle point
- determining the types of critical point
- batch size
- momentum method
- adaptive learning rate
- AdaGrad
- RMSProp
- Adam
- learning rate scheduling
- classfication